基础算法
快速排序
c++
#include <cstdio>
#include <iostream>
using namespace std;
const int N = 1e5 + 10;
int n;
int q[N];
void quick_sort(int q[], int l, int r) {
if (l >= r) return;
//x取左边界时,即x = q[l] 或 x = q[(l + r) >> 1],
//必须要用j,因为(q, l, i - 1),(q, i, r)如果左边不动,在左边界相遇最后i = j = 左边界,
//第二个范围相当于(q, l, r);相当于没动,进入死循环,
//而(q, l, j)(q, j + 1, r),第二个会少一个数,不会进入死循环
//同理,x取右边界,即x = [r] 或 x = [l + r + 1>> 1],必须用i
/*
用i则不能取到左边界,把x取值改成向上取整
用j则不能取到右边界,把x取值改成向下取整
取到边界会导致递归死循环
*/
int x = q[(l + r + 1) >> 1], i = l - 1, j = r + 1;
while (i < j) {
do i++; while (q[i] < x);
do j--; while (q[j] > x);
if (i < j) swap(q[i], q[j]);
}
quick_sort(q, l, i - 1);
quick_sort(q, i, r);
}
int main()
{
scanf("%d", &n);
for (int i = 0; i < n; i++) {
scanf("%d", &q[i]);
}
quick_sort(q, 0, n - 1);
for (int i = 0; i < n; i++) {
printf("%d ", q[i]);
}
return 0;
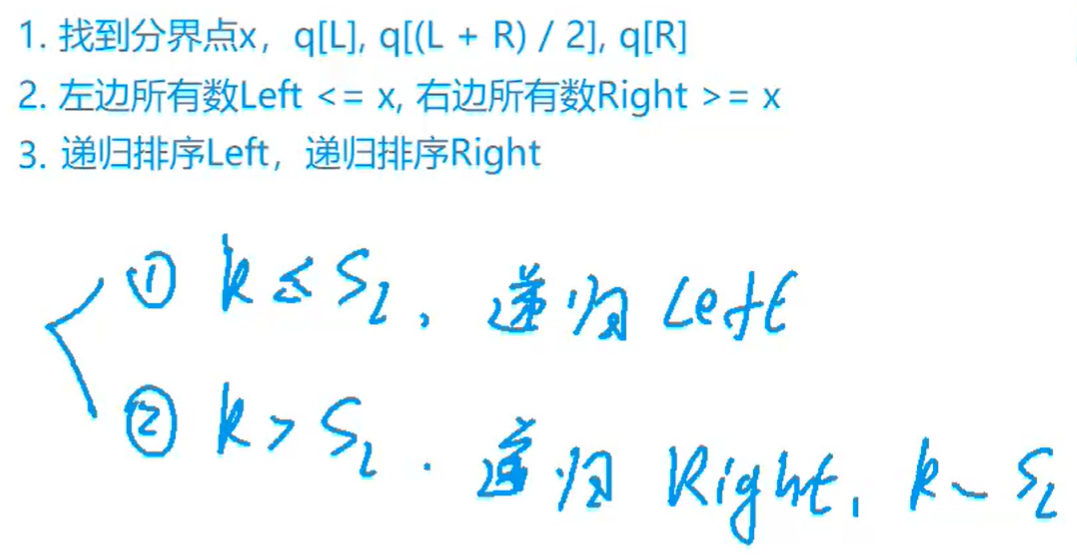
}快速选择排序:求第K小的数
c++
int quick_select(int l, int r, int k) {
if (l >= r) return a[l];
int i = l - 1, j = r + 1, x = a[l + r >> 1];
while (i < j) {
do i++; while(a[i] < x);
do j--; while(a[j] > x);
if (i < j) swap(a[i],a[j]);
}
int sl = j - l + 1;
if (sl >= k) {
return quick_select(l, j, k);
} else {
return quick_select(j + 1, r, k - sl);
}
}归并排序
c++
#include <cstdio>
#include <iostream>
#include <cstring>
#include <algorithm>
using namespace std;
const int N = 1e5 + 10;
int q[N],temp[N];
int n;
void merge_sort(int q[], int l, int r) {
if (l >= r) return;
//划分
int mid = l + r >> 1;
merge_sort(q, l, mid);
merge_sort(q, mid + 1, r);
//归并
int i = l, j = mid + 1, k = 0;
while (i <= mid && j <= r) {
if (q[i] <= q[j]) {
temp[k++] = q[i++];
} else {
temp[k++] = q[j++];
}
}
while (i <= mid) {
temp[k++] = q[i++];
}
while (j <= r) {
temp[k++] = q[j++];
}
for (i = l, j = 0; i <= r; i++, j++) {
q[i] = temp[j];
}
}
int main()
{
scanf("%d", &n);
for (int i = 0; i < n; i++) {
scanf("%d", &q[i]);
}
merge_sort(q, 0, n - 1);
for (int i = 0; i < n; i++) {
printf("%d ", q[i]);
}
return 0;
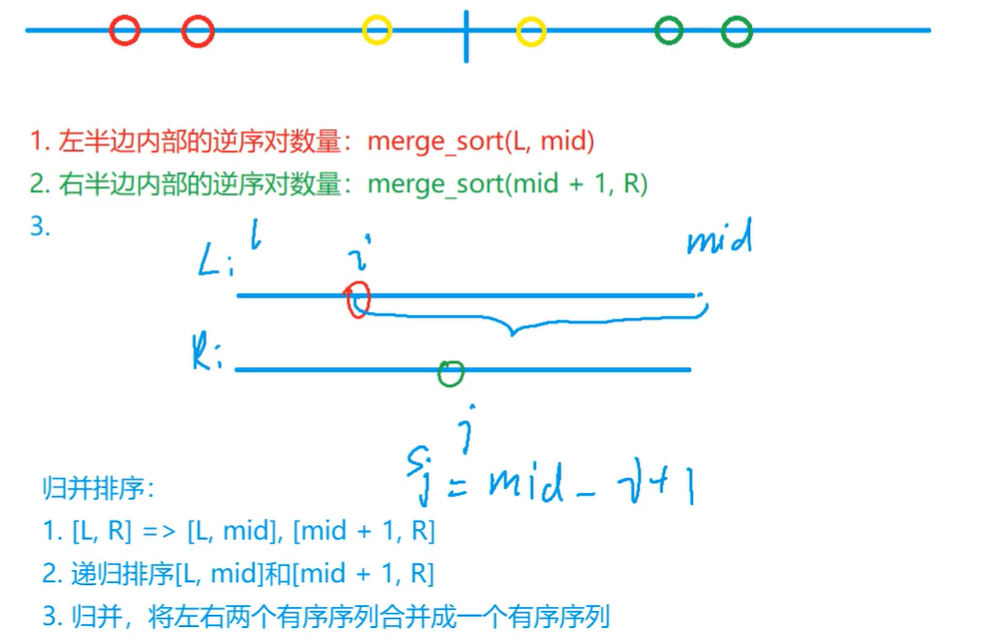
}求逆序对数量
c++
#include <iostream>
using namespace std;
typedef long long LL;
const int N = 1e5 + 10;
int n;
int a[N], temp[N];
LL merge_sort(int a[], int l, int r) {
if (l >= r) return 0;
int mid = (l + r) >> 1;
int lCount = merge_sort(a, l, mid);
int rCount = merge_sort(a, mid + 1, r);
//归并
LL res = lCount + rCount;
int i = l, j = mid + 1, k = 0;
while (i <= mid && j <= r) {
if (a[i] <= a[j]) {
temp[k++] = a[i++];
} else {
temp[k++] = a[j++];
res += mid - i + 1;//核心
}
}
while (i <= mid) temp[k++] = a[i++];
while (j <= r) temp[k++] = a[j++];
//
for (i = l, j = 0; i <= r; i++, j++) {
a[i] = temp[j];
}
return res;
}
int main()
{
cin >> n;
for (int i = 0; i < n; i++) {
cin >> a[i];
}
LL count = merge_sort(a, 0, n - 1);
cout << count;
return 0;
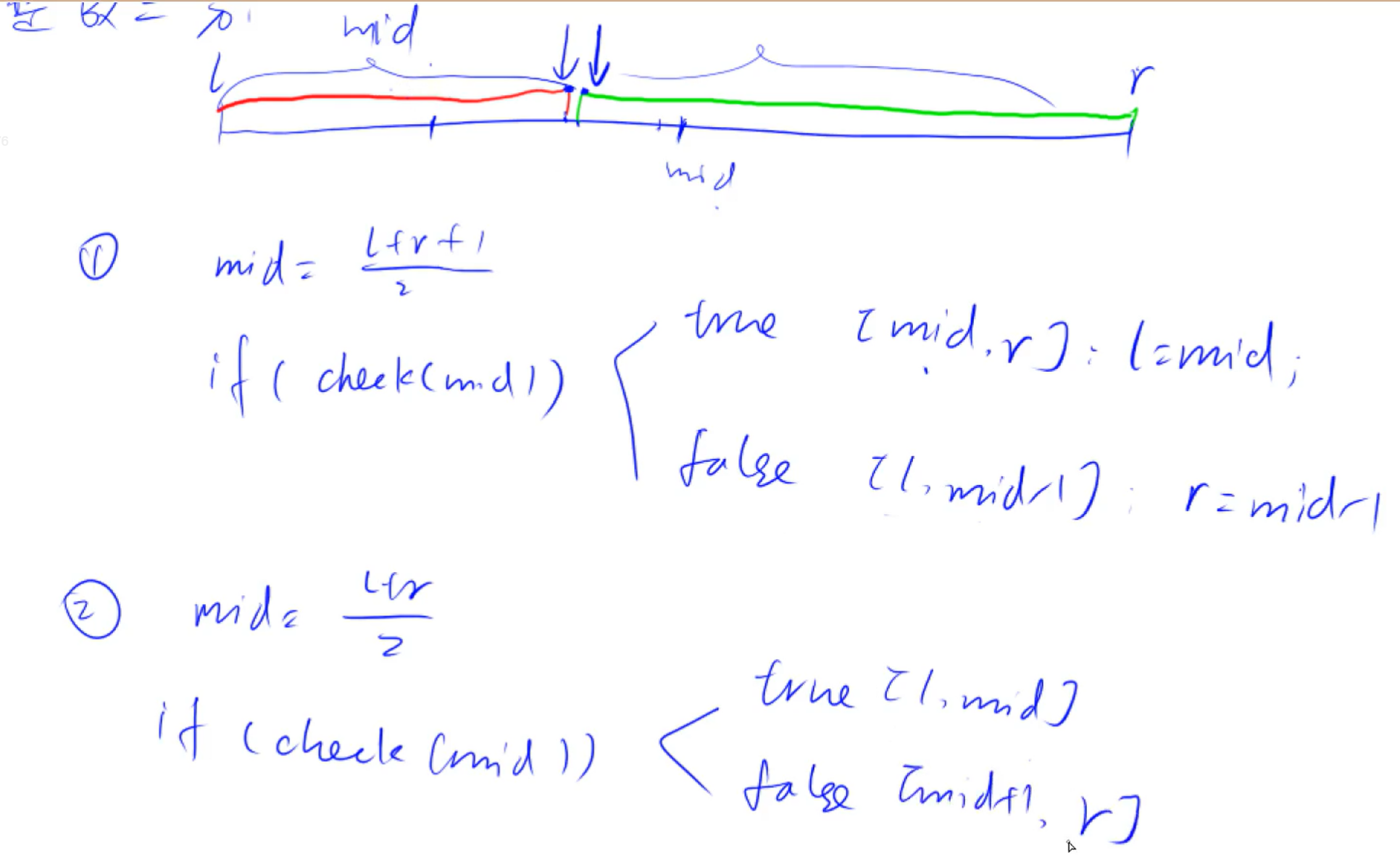
}整数二分
检查函数是否满足某种性质
找到符合性质的最大的数或最小的数
c++
bool check(int x) {/* ... */} // 检查x是否满足某种性质
// 区间[l, r]被划分成[l, mid]和[mid + 1, r]时使用:
//区间不断向左缩,r = mid,绿色的线,找到满足某种性质的最小的数
int bsearch_1(int l, int r)
{
while (l < r)
{
int mid = l + r >> 1;
if (check(mid)) r = mid; // check()判断mid是否满足性质
else l = mid + 1;
}
return l;
}
// 区间[l, r]被划分成[l, mid - 1]和[mid, r]时使用:
//区间不断向右缩,l = mid;,红色的线,找到满足某种性质的最大的数
int bsearch_2(int l, int r)
{
while (l < r)
{
int mid = l + r + 1 >> 1;
if (check(mid)) l = mid;
else r = mid - 1;
}
return l;
}c++
#include <iostream>
#include <cstdio>
#include <string>
#include <algorithm>
using namespace std;
const int N = 1e5 + 10;
int a[N];
int n, q, x;
int main()
{
scanf("%d%d", &n, &q);
for (int i = 0; i < n; i++) {
scanf("%d", &a[i]);
}
while (q--) {
scanf("%d", &x);
int l = 0, r = n - 1;
while (l < r) {
int mid = l + r >> 1;
if (a[mid] >= x) {
r = mid;//mid不断更新为r,如果向上取整可能会取为r相当于没变
} else {
l = mid + 1;
}
}
//满足>=x最小的数不是x,即不存在x
if (a[l] != x) {
cout << "-1 -1" << endl;
} else {
cout << l << " ";
int l = 0, r = n - 1;
while (l < r) {
int mid = l + r + 1 >> 1;
if (a[mid] <= x) {
l = mid;
} else {
r = mid - 1;
}
}
cout << l << endl;
}
}
}小数二分
c++
bool check(double x) {/* ... */} // 检查x是否满足某种性质
double bsearch_3(double l, double r)
{
//保留4小数1e-6,5位小数1e-7,6位小数1e-8
const double eps = 1e-6; // eps 表示精度,取决于题目对精度的要求
while (r - l > eps)
{
double mid = (l + r) / 2;
if (check(mid)) r = mid;
else l = mid;
}
return l;
}高精度加法
c++
vector<int> add(vector<int> a, vector<int> b) {
vector<int> c(a.size() + b.size(), 0);
for (int i = 0; i < a.size(); i++) c[i] += a[i];
for (int i = 0; i < b.size(); i++) c[i] += b[i];
for (int i = 0; i < c.size() - 1; i++) {
c[i + 1] += c[i] / 10;
c[i] = c[i] % 10;
}
while (c.size() > 1 && c.back() == 0) c.pop_back();
return c;
}c++
vector<int> add(vector<int>& A, vector<int>& B) {
if (A.size() < B.size()) return add(B,A);
vector<int> C;
int t = 0;//进位
for (int i = 0; i < A.size(); i++) {
A[i] += t;
if (i < B.size()) A[i] += B[i];
C.push_back(A[i] % 10);
t = A[i] / 10;
}
if (t) {
C.push_back(t);
}
return C;
}高精度减法
c++
// C = A - B, 满足A >= B, A >= 0, B >= 0
vector<int> sub(vector<int>& A, vector<int>& B) {
int t = 0;//借位
vector<int> C;
for (int i = 0; i < A.size(); i++) {
A[i] -= t;
if (i < B.size()) A[i] -= B[i];
C.push_back((A[i] + 10) % 10);
if (A[i] < 0) t = 1;
else t = 0;
}
while (C.size() > 1 && C.back() == 0) C.pop_back();
return C;
}高精度×低精度
c++
vector<int> mul(vector<int> &A, int b) {
int t = 0;
vector<int> C;
for (int i = 0; i < A.size() || t; i++) {
if(i < A.size()) t += A[i] * b;
C.push_back(t % 10);
t /= 10;
}
while (C.size() > 1 && C.back() == 0) C.pop_back();
return C;
}高精度×高精度
c++
vector<int> mul(vector<int> a, vector<int> b) {
vector<int> c(a.size() + b.size() + 10, 0);
for (int i = 0; i < a.size(); i++) {
for (int j = 0; j < b.size(); j++) {
c[i + j] += a[i] * b[j];//+=
}
}
for (int i = 0; i + 1 < c.size(); i++) {
c[i + 1] += c[i] / 10;
c[i] = c[i] % 10;
}
while (c.size() > 1 && c.back() == 0) c.pop_back();
return c;
}高精度÷低精度
c++
vector<int> div(vector<int> &A, int b, int &r) {//余数引用
vector<int> C;
for (int i = A.size() - 1; i >= 0; i--) {//从高位开始除
r = r * 10 + A[i];
C.push_back(r / b);
r = r % b;
}
reverse(C.begin(), C.end());
while (C.size() > 1 && C.back() == 0) C.pop_back();
return C;
}一维前缀和
S[i] = a[1] + a[2] + ... a[i]
s[0] = 0;
求前缀和s[i] = s[i - 1] + a[i]
a[l] + ... + a[r] = S[r] - S[l - 1]二维前缀和
求前缀和s[i][j] = s[i - 1][j] + s[i][j - 1] - s[i - 1][j - 1] + a[i][j];
S[i, j] = 第i行j列格子左上部分所有元素的和
以(x1, y1)为左上角,(x2, y2)为右下角的子矩阵的和为:
S[x2, y2] - S[x1 - 1, y2] - S[x2, y1 - 1] + S[x1 - 1, y1 - 1]
s[x2][y2] - s[x2][y1 - 1] - s[x1 - 1][y2] + s[x1 - 1][y1 - 1]一维差分
给区间[l, r]中的每个数加上c:B[l] += c, B[r + 1] -= c知识点1:差分与前缀和是一组相反的操作,假设给定一个数组 A ,其前缀和数组表示A[i]及其之前所有数的和。其差分数组则表示该数组的前缀和为A[i],即假设B的前缀和数组为A,则B是A的差分数组。
知识点2:假设给定一个数组 A ,其差分数组为 B, 如果对A数组的某个区间 [l, r]上每个数都加一个数c, 其等价于 B 数组中 B[l] += c,且 B[r + 1] -=c。因为A[l]表示B[l]的前缀和,则如果B[l]多加一个c(B[l] += c),则A[l](B[1] + B[2] + ...B[l] + c), A[l+1], …, A[r], A[r + 1], …, A[n] 都将多加一个c。而我们只需要 [l, r] 上加c,所以对于 A 在 [r+1, n]区间上的值再减去 c,即对应于 B[r + 1] -= c。
知识点3:在初始化时,我们可以理解为在0数组上,依次插入一个c = A[i],则只需要对差分数组执行 B[i] += A[i], B[i + 1] -= A[i]即可
知识点4:最终所有m个操作后,得到的是对差分数组B的操作,分别求其各个位置的前缀和即得到A数组
知识点5:本题其实可以直接按照原始的方法,依次遍历 A 数组的 [l, r] 区间,并执行 A[i] += c,但每次的操作的时间复杂度都是O(n),使用差分数组,则可以将每次操作转换为一个公式即可,即时间复杂度变为 O(1)。更直观的来说,修改前缀和的某个连续区间范围内的值,可以转化为只需要修改其差分数组的某两个值。c++
#include <iostream>
using namespace std;
const int N = 1e5 + 10;
int n, m;
int a[N], b[N];
void insert(int l, int r, int c) {
b[l] += c;
b[r + 1] -= c;
}
int main()
{
scanf("%d%d", &n, &m);
for (int i = 1; i <= n; i++) {
scanf("%d", &a[i]);
}
//构造差分数组b
//第一次a1 -a1
//第二次a1 a2-a1 -a2
//第三次a1 a2-a1 a3-a2 -a3
//第四次a1 a2-a1 a3-a2 a4-a3 -a4
//b数组的前缀和是a,b构成a的差分数组
for (int i = 1; i <= n; i++) {
insert(i, i, a[i]);
}
//利用前缀和求
//for (int i = i; i <= n; i++) {
// b[i] = a[i] - a[i - 1];
//}
while (m--) {
int l, r, c;
scanf("%d%d%d", &l, &r, &c);
insert(l, r, c);
}
//求a
for (int i = 1; i <= n; i++) {
b[i] = b[i - 1] + b[i];
printf("%d ", b[i]);
}
return 0;
}c++
for (int i = 1; i <= n; i++) {
insert(i, i, a[i]);
}其实是假定a数组最开始都是0,那么b数组初始时就是a数组的差分数组了,对于每一个a[i],相当于插入了一个数,可以直接调用insert函数即可。 当然也可以从差分数组的定义出发,for(int i=1;i<=n;i) b[i]=a[i]-a[i-1]; 用这一行替换上一行,效果一样,只是上边的把a数组当成全为0,读入的a[i]再插入,这一个把读入后的当做a数组。
二维差分
给以(x1, y1)为左上角,(x2, y2)为右下角的子矩阵中的所有元素加上c:
S[x1, y1] += c, S[x2 + 1, y1] -= c, S[x1, y2 + 1] -= c, S[x2 + 1, y2 + 1] += cc++
#include <iostream>
using namespace std;
const int N = 1010;
int n, m, q;
int a[N][N], b[N][N];
void insert(int x1, int y1, int x2, int y2, int c) {
b[x1][y1] += c;
b[x2 + 1][y1] -= c;
b[x1][y2 + 1] -= c;
b[x2 + 1][y2 + 1] += c;
}
int main()
{
scanf("%d%d%d",&n, &m, &q);
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= m; j++) {
scanf("%d", &a[i][j]);
}
}
//构造差分数组b
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= m; j++) {
insert(i, j, i, j, a[i][j]);
}
}
//利用前缀和公式,a为b的前缀和
// for (int i = 1; i <= n; i++) {
// for (int j = 1; j <= m; j++) {
// b[i][j] = a[i][j] - a[i - 1][j] - a[i][j - 1] + a[i - 1][j - 1];
// }
// }
while (q--) {
int x1, y1, x2, y2, c;
scanf("%d%d%d%d%d", &x1, &y1, &x2, &y2, &c);
insert(x1, y1, x2, y2, c);
}
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= m; j++) {
b[i][j] = b[i - 1][j] + b[i][j - 1] - b[i - 1][j - 1] + b[i][j];
printf("%d ", b[i][j]);
}
printf("\n");
}
return 0;
}双指针算法
c++
for (int i = 0, j = 0; i < n; i ++ )
{
while (j < i && check(i, j)) j ++ ;
// 具体问题的逻辑
}常见问题分类:
(1) 对于一个序列,用两个指针维护一段区间
(2) 对于两个序列,维护某种次序,比如归并排序中合并两个有序序列的操作位运算
求n的第k位数字: ((n >> k) & 1)
返回n的最后一位1:lowbit(n) = n & -n //求1的个数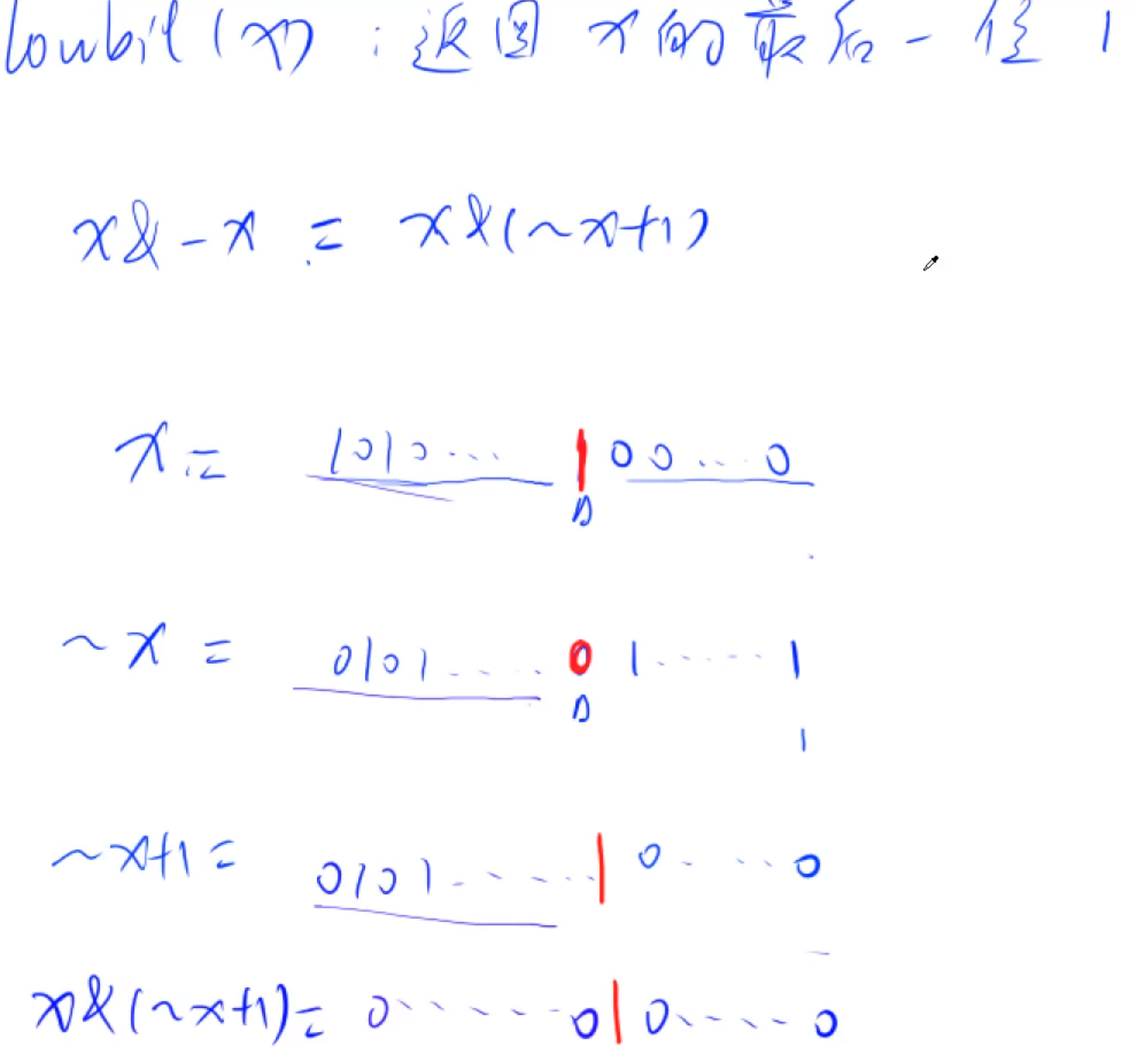
离散化
c++
vector<int> alls; // 存储所有待离散化的值
sort(alls.begin(), alls.end()); // 将所有值排序
alls.erase(unique(alls.begin(), alls.end()), alls.end()); // 去掉重复元素
//离散化 将所有去重后待离散化的值映射到1 - alls.size()上
//每一个去重后的值对应一个1 - alls.size()下标
//建立新索引,来缩小目标区间,使得可以进行一系列连续数组可以进行的操作比如二分,前缀和等…
// 二分求出x对应的离散化的值
int find(int x) // 找到第一个大于等于x的位置
{
int l = 0, r = alls.size() - 1;
while (l < r)
{
int mid = l + r >> 1;
if (alls[mid] >= x) r = mid;
else l = mid + 1;
}
//因为使用前缀和,其下标要+1可以不考虑边界问题
return r + 1; // 映射到1, 2, ...n
}c++
//对非递减数组进行去重,unique()函数的底层原理
vector<int>::iterator unique(vector<int>& arr) {
int j = 0;
for (int i = 0; i < arr.size(); i++) {
if (!i || arr[i] != arr[i - 1]) {
arr[j++] = arr[i];
}
}
return arr.begin() + j;
}区间合并
c++
// 将所有存在交集的区间合并
void merge(vector<pair<int, int>> &arr)
{
sort(arr.begin(), arr.end());
// 左右端点初始化,-无穷
int start = -2e9, end = -2e9;
vector<pair<int, int>> res;
for (auto item : arr) {
if(item.first > end) {
if(start != -2e9) res.push_back({start, end});// 初始的[-无穷,-无穷]区间要跳过,不能装入
start = item.first;//更新区间
end = item.second;//更新区间
} else {
end = max(end, item.second);
}
}
// 有两个作用,1.是防止n为0,把[-无穷,-无穷]压入;2.是压入最后一个(也就是当前)的区间,若n>=1,if可以不要
if (start != -2e9) {
res.push_back({start ,end});//最后一段区间
}
arr = res;
}数据结构
单链表
c++
//下标相当于地址,idx相当于地址
int e[N], ne[N], idx;
void init()
{
//e[0] = 0;
ne[0] = -1;//将下标0作为头指针节点,不参与运算,但便于统一操作
idx++;//从1开始分配地址
}
void add(int k, int x)
{
e[idx] = x;
ne[idx] = ne[k];
ne[k] = idx++;
}
void remove(int k) {
ne[k] = ne[ne[k]];//cur->next = cur->next->next;
}
for (int i = ne[0]; i != -1; i = ne[i]) {
cout << e[i] << " ";
}双链表
c++
// val[]表示节点的值,l[]表示节点的左指针,r[]表示节点的右指针
int val[N], l[N], r[N];
int cur;//下标相当于地址,cur相当于地址
void init() {
//0是左端点,1是右端点
cur = 2;
r[0] = 1;//初始时0的右端点为1
l[1] = 0;//1的左端点为0
}
//在第k个数的右边插入x
void insert_list(int k, int x) {
val[cur] = x;
r[cur] = r[k];
l[cur] = k;
l[r[k]] = cur;
r[k] = cur;
cur++;
}
void delete_list(int k) {
r[l[k]] = r[k];
l[r[k]] = l[k];
}
//遍历
for (int i = r[0]; i != 1; i = r[i]) {
cout << val[i] << " ";
}- 之所以在 “D”, “IL”, “IR” 要用
k+1的原因是 双链表的起始点是2. 所以,每个插入位置k的真实位置应该为k-1+2 = k+1 - 0, 1 节点的作用是边界。0为左边界,1为右边界。他俩在这里有点类似保留字的作用。正因如此,我们的cur也是从2开始
- 最后遍历输出结果的
for (int i = r[0]; i != 1; i = r[i])。从 r[0] 开始是因为 0 为左边界,而终止条件 i==1是因为1为右边界(如果碰到,说明已经遍历完毕)
栈
c++
// tt表示栈顶
int stk[N], tt = 0;
// 向栈顶插入一个数
stk[ ++ tt] = x;
// 从栈顶弹出一个数
tt -- ;
// 栈顶的值
stk[tt];
// 判断栈是否为空,如果 tt > 0,则表示不为空
if (tt > 0){
}队列
c++
//普通队列
// hh 表示队头,tt表示队尾
int q[N], hh = 0, tt = -1;
// 向队尾插入一个数
q[ ++ tt] = x;
// 从队头弹出一个数
hh ++ ;
// 队头的值
q[hh];
// 判断队列是否为空,如果 hh <= tt,则表示不为空
if (hh <= tt){
}c++
//循环队列
// hh 表示队头,tt表示队尾的后一个位置
int q[N], hh = 0, tt = 0;
// 向队尾插入一个数
q[tt ++ ] = x;
if (tt == N) tt = 0;
// 从队头弹出一个数
hh ++ ;
if (hh == N) hh = 0;
// 队头的值
q[hh];
// 判断队列是否为空,如果hh != tt,则表示不为空
if (hh != tt){
}单调栈
c++
常见模型:找出每个数左边离它最近的比它大/小的数
int stk[N], tt;
for (int i = 1; i <= n; i ++ )
{
while (tt && check(stk[tt], i)) tt -- ;
stk[ ++ tt] = i;
}单调队列
c++
常见模型:找出滑动窗口中的最大值/最小值
int hh = 0, tt = -1;
for (int i = 0; i < n; i ++ )
{
while (hh <= tt && check_out(q[hh])) hh ++ ; // 判断队头是否滑出窗口
while (hh <= tt && check(q[tt], i)) tt -- ;
q[ ++ tt] = i;
}本质上就是删除那些没有必要的元素,形成一个候选集
Trie树/字典树/前缀树
c++
//son[父亲地址][儿子的名字] = 儿子地址
//count[]存储以每个地址结尾的单词数量
//cur分配地址
int son[N][26], count[N], idx;
char str[N];
// 插入一个字符串
void Insert(char *str) {
int p = 0;
for (int i = 0; str[i]; i++) {
int c = str[i] - 'a';
if (!son[p][c]) son[p][c] = ++idx;
p = son[p][c];
}
count[p]++;
}
// 查询字符串出现的次数
int Query(char *str) {
int p = 0;
for (int i = 0; str[i]; i++) {
int c = str[i] - 'a';
if (!son[p][c]) return 0;
p = son[p][c];
}
return count[p];
}并查集
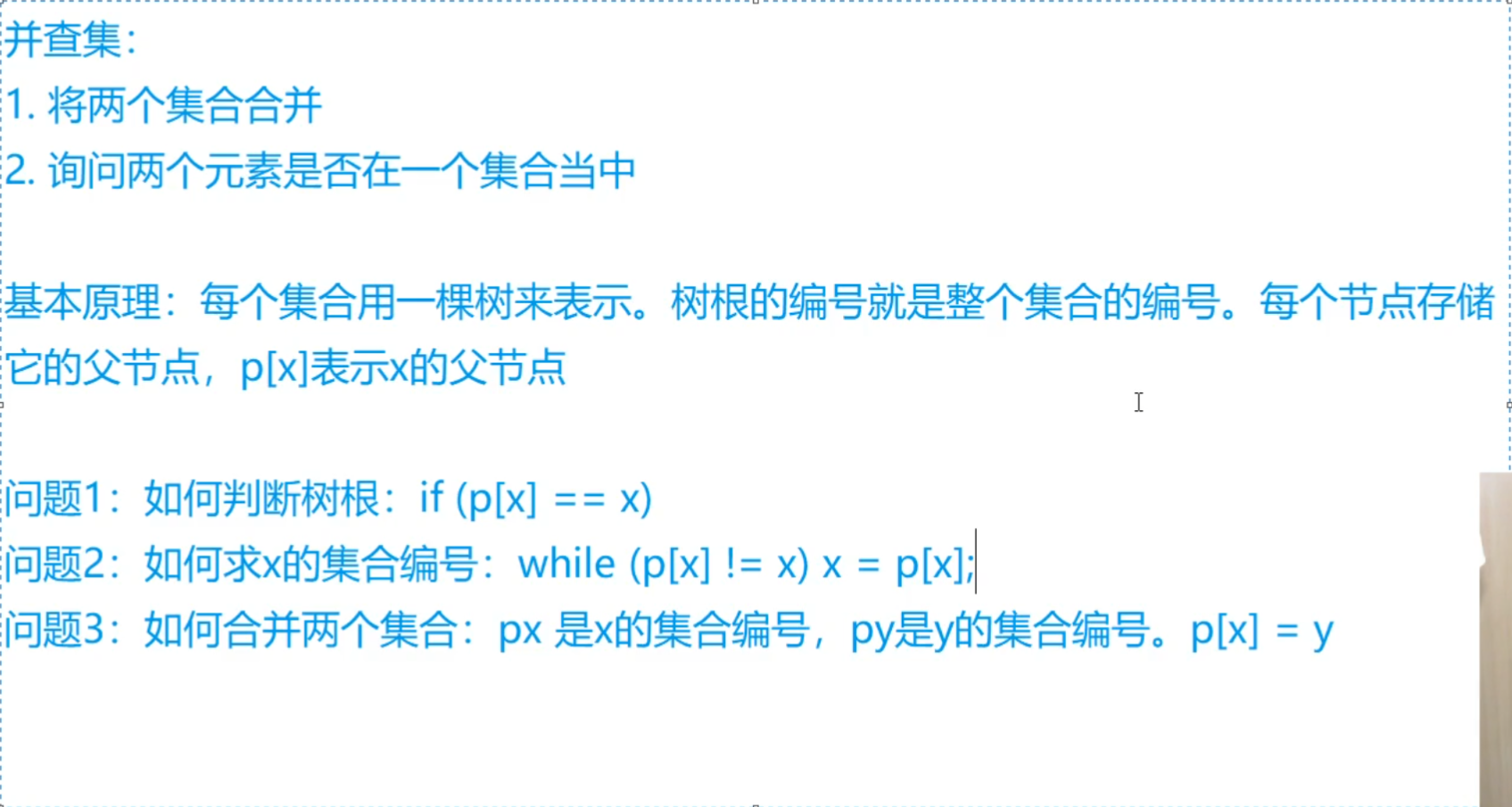
c++
(1)朴素并查集:
int p[N]; //存储每个点的祖宗节点
// 返回x的祖宗节点
int find(int x)
{//只要当前节点不是根节点,就返回当前节点的父节点的祖宗节点
if (p[x] != x) p[x] = find(p[x]);
return p[x];
}
// 初始化,假定节点编号是1~n
for (int i = 1; i <= n; i ++ ) p[i] = i;
// 合并a和b所在的两个集合:
p[find(a)] = find(b);
(2)维护size的并查集:
int p[N], size[N];
//p[]存储每个点的祖宗节点, size[]只有祖宗节点的有意义,表示祖宗节点所在集合中的点的数量
// 返回x的祖宗节点
int find(int x)
{
if (p[x] != x) p[x] = find(p[x]);
return p[x];
}
// 初始化,假定节点编号是1~n
for (int i = 1; i <= n; i ++ )
{
p[i] = i;
size[i] = 1;
}
// 合并a和b所在的两个集合:
size[find(b)] += size[find(a)];
p[find(a)] = find(b);
(3)维护到祖宗节点距离的并查集:
int p[N], d[N];
//p[]存储每个点的祖宗节点, d[x]存储x到p[x]的距离
// 返回x的祖宗节点
int find(int x)
{
if (p[x] != x)
{
int u = find(p[x]);
d[x] += d[p[x]];
p[x] = u;
}
return p[x];
}
// 初始化,假定节点编号是1~n
for (int i = 1; i <= n; i ++ )
{
p[i] = i;
d[i] = 0;
}
// 合并a和b所在的两个集合:
p[find(a)] = find(b);
d[find(a)] = distance; // 根据具体问题,初始化find(a)的偏移量堆
c++
// h[N]存储堆中的值, h[1]是堆顶,x的左儿子是2x, 右儿子是2x + 1
// ph[k]存储第k个插入的点在堆中的位置
// hp[k]存储堆中下标是k的点是第几个插入的
// ph(point->heap) 可以获得第几个插入的元素现在在堆的那个位置
// hp(heap->point) 堆中的位置是第几个插入的
int h[N], ph[N], hp[N], size;
// 交换两个点,及其映射关系
// h[x] 表示树中位置 x 的元素
// ph[k] = x 表示第 k 个插入的元素在树中存放的位置 x
// 此时如果要交换 ph 中的两个元素需要知道树中位置 x 是第几个被插入的, 于是便引入了数组 hp
// hp[x] = k 表示树中位置 x 存放的为第 k 个插入的元素
void heap_swap(int a, int b)
{
swap(ph[hp[a]],ph[hp[b]]);
swap(hp[a], hp[b]);
swap(h[a], h[b]);//值输入
}
void down(int u)
{
int t = u;
if (u * 2 <= size && h[u * 2] < h[t]) t = u * 2;
if (u * 2 + 1 <= size && h[u * 2 + 1] < h[t]) t = u * 2 + 1;
if (u != t)
{
heap_swap(u, t);//下标输入
down(t);
}
}
void up(int u)
{
while (u / 2 && h[u] < h[u / 2])
{
heap_swap(u, u / 2);
u >>= 1;
}
}
// O(n)建堆
for (int i = n / 2; i; i -- ) down(i);一般哈希
c++
(1) 拉链法
const int N = 1e5 + 3; //取一个大于题目范围的质数作为模,减少冲突
int h[N], e[N], ne[N];
int idx;
// 向哈希表中插入一个数
void insert(int x) {
int k = ((x % N) + N) % N;
e[idx] = x;
ne[idx] = h[k];
h[k] = idx;
idx++;
}
// 在哈希表中查询某个数是否存在
bool find(int x) {
int k = ((x % N) + N) % N;
for (int i = h[k]; i != -1; i = ne[i]) {
if (e[i] == x) {
return true;
}
}
return false;
}c++
(2) 开放寻址法
const int N = 2e5 + 3;//一般开2-3倍原数组,防止塞满了,导致死循环
const int null = 0x3f3f3f3f;//取一个大于插入数值范围的数,表示这个位置没有插入任何数
int h[N];
// 如果x在哈希表中,返回x的下标;如果x不在哈希表中,返回x应该插入的位置
int find(int x) {
int k = ((x % N) + N) % N;
while (h[k] != null && h[k] != x) {
k++;
if (k == N) k = 0;//找到末尾了从0开始
}
return k;
}- 取模的模数,一般是质数(不容易冲突),且一般先模再加再模(处理负数)(讲究顺序,例:-10^9^先加N即10^5^的话再模,还是负数)
- 拉链法:头插法(数组模拟)
- 开放寻址法(蹲坑法): 通常开数组为目标数组大小的2-3倍,find函数的功能(寻找坑位),其返回值:若原本存在,返回存在位置的下标,若原本不存在,返回可以插入的位置下标。
- 有关无穷大设置,在算法竞赛中,我们常采用0x3f3f3f3f来作为无穷大。0x3f3f3f3f主要有如下好处:
- 0x3f3f3f3f的十进制为1061109567,和INT_MAX一个数量级,即10^9^数量级,而一般场合下的数据都是小于10^9^的。
- 0x3f3f3f3f * 2 = 2122219134,无穷大相加依然不会溢出。
- 可以使用memset(array, 0x3f, sizeof(array))来为数组设初值为0x3f3f3f3f,因为这个数的每个字节都是0x3f
字符串哈希
核心思想:将字符串看成P进制数,P的经验值是131或13331,取这两个值的冲突概率低
最后字符串很长计算出来的值会超过ULL
小技巧:取模的数用2^64,这样直接用unsigned long long存储,溢出的结果就是取模的结果
typedef unsigned long long ULL;
ULL h[N], p[N]; // h[k]存储字符串前k个字母的哈希值, p[k]存储 P^k mod 2^64
// 初始化
p[0] = 1;
for (int i = 1; i <= n; i ++ )
{
h[i] = h[i - 1] * P + str[i];//str[i]是字符串的话要映射成数字
p[i] = p[i - 1] * P;
}
// 计算子串 str[l ~ r] 的哈希值
ULL get(int l, int r)
{
return h[r] - h[l - 1] * p[r - l + 1];
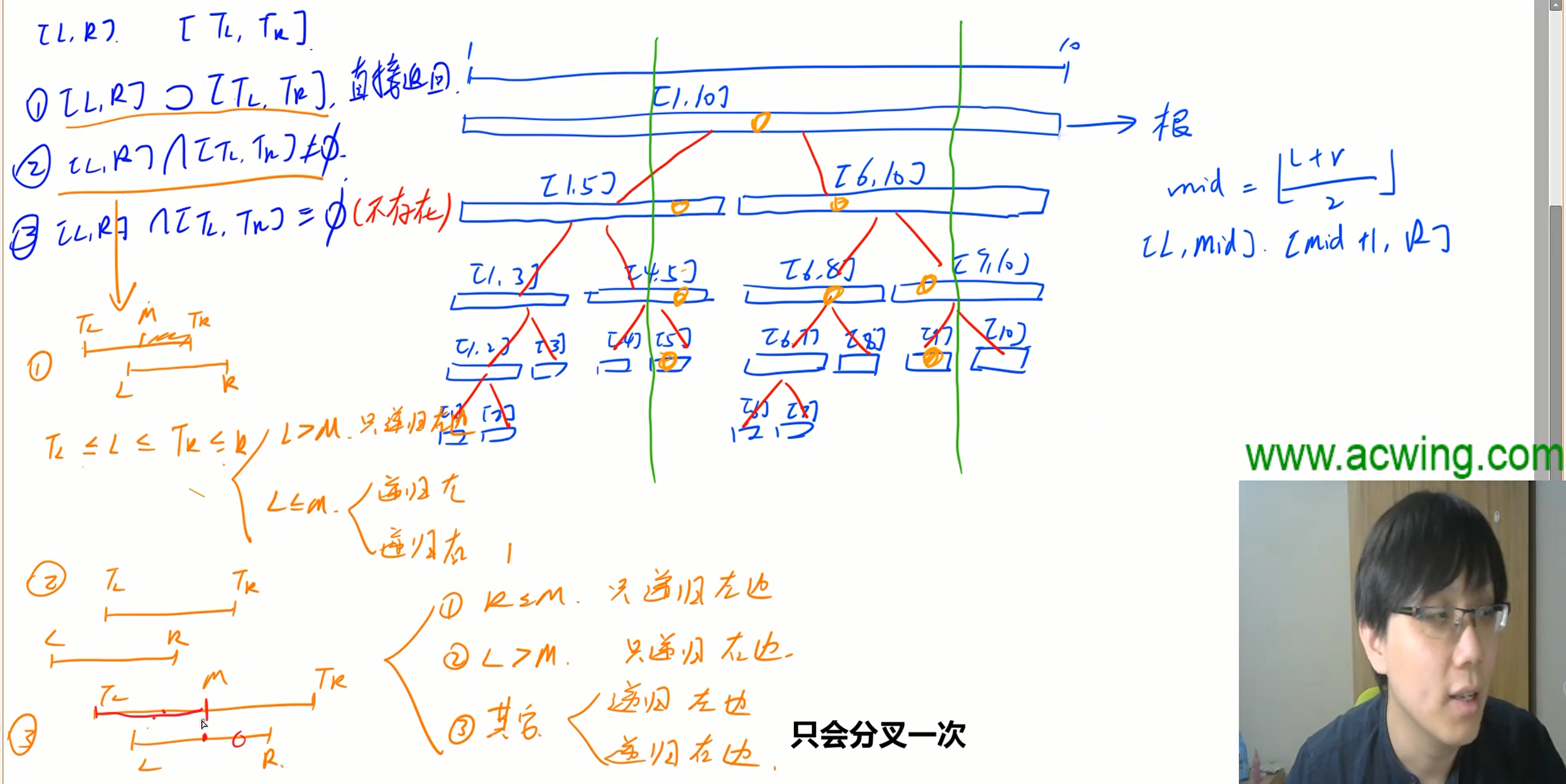
}线段树
最多只会递归一边,分叉一次,复杂度为递归深度$O(logn)$
c++
int w[N];
struct Node{
int l, r;
int sum;
}tr[N * 4];
// 通过子节点来更新父节点,向上更新
void pushup(int u) {
tr[u].sum = tr[u << 1].sum + tr[u << 1 | 1].sum;
}
// 建树
void build(int u, int l, int r) {
if (l == r) tr[u] = {l, r, w[l]};
else
{
tr[u] = {l, r};
int mid = l + r >> 1;
build(u << 1, l, mid), build(u << 1 | 1, mid + 1, r);
pushup(u);
}
}
int query(int u, int l, int r) { // 区间查询
if (tr[u].l >= l && tr[u].r <= r) return tr[u].sum;
int sum = 0; // 相关操作
int mid = tr[u].l + tr[u].r >> 1;
//区间不变,因为l <= mid时,r也可能比mid小,此时如果把r更新成mid,那就会错误地把要查询的区间变长
//比如原区间是1-10,你要求2-3区间的和,也就是query(1,2,3),此时mid是5,如果将r更新成mid,就变成query(2,2,5),就不对了
if (l <= mid) sum += query(u << 1, l, r);
if (r > mid) sum += query(u << 1 | 1, l, r);
return sum;
}
// 将数组第x的位置修改为v
void modify(int u, int x, int v) { // 单点修改,不需要懒标记
if (tr[u].l == x && tr[u].r == x) tr[u].sum += v;
else
{
int mid = tr[u].l + tr[u].r >> 1;
if (x <= mid) modify(u << 1, x, v);
else modify(u << 1 | 1, x, v);
pushup(u); // 该更后一定要记得更新父节点
}
}c++
int w[N];
struct Node{
int l, r;
ll sum, add;// add 懒标记,延迟更新
}tr[N * 4];
void pushup(int u) {
tr[u].sum = tr[u << 1].sum + tr[u << 1 | 1].sum;
}
void pushdown(int u) {
auto &root = tr[u], &left = tr[u << 1], &right = tr[u << 1 | 1];
if (root.add) {
left.sum += (ll)(left.r - left.l + 1) * root.add, left.add += root.add;
right.sum += (ll)(right.r - right.l + 1) * root.add, right.add += root.add;
root.add = 0;
}
}
void build(int u, int l, int r) {
if (l == r) tr[u] = {l, r, w[l], 0};
else
{
tr[u] = {l, r};
int mid = l + r >> 1;
build(u << 1, l, mid), build(u << 1 | 1, mid + 1, r);
pushup(u);
// cout << "tree:" << u << " " << tr[u].sum << endl;
}
}
void modify(int u, int l, int r, int v) {// 区间修改
if (tr[u].l >= l && tr[u].r <= r) {
tr[u].sum += (ll)(tr[u].r - tr[u].l + 1) * v;
tr[u].add += v;
}
else
{
pushdown(u); // 将父节点信息同步到子节点,保证子节点sum正确,实现延迟更新
int mid = tr[u].l + tr[u].r >> 1;
if (l <= mid) modify(u << 1, l, r, v);
if (r > mid) modify(u << 1 | 1, l, r, v);
pushup(u);
}
}
ll query(int u, int l, int r) {
if (tr[u].l >= l && tr[u].r <= r) return tr[u].sum;
else
{
// cout << "tree:" << u << " " << tr[u].sum << endl;
pushdown(u);
ll sum = 0;
int mid = tr[u].l + tr[u].r >> 1;
if (l <= mid) sum += query(u << 1, l, r);
if (r > mid) sum += query(u << 1 | 1, l, r);
// cout << "tree:" << u << " " << sum << endl;
return sum;
}
}C++ STL简介
markdown
vector, 变长数组,倍增的思想
size() 返回元素个数
empty() 返回是否为空
clear() 清空
front()/back()
push_back()/pop_back()
begin()/end()
[]
支持比较运算,按字典序
pair<int, int>
first, 第一个元素
second, 第二个元素
支持比较运算,以first为第一关键字,以second为第二关键字(字典序)
string,字符串
size()/length() 返回字符串长度
empty()
clear()
substr(起始下标,(子串长度)) 返回子串
c_str() 返回字符串所在字符数组的起始地址
queue, 队列
size()
empty()
push() 向队尾插入一个元素
front() 返回队头元素
back() 返回队尾元素
pop() 弹出队头元素
priority_queue, 优先队列,默认是大根堆
size()
empty()
push() 插入一个元素
top() 返回堆顶元素
pop() 弹出堆顶元素
定义成小根堆的方式:priority_queue<int, vector<int>, greater<int>> q;
stack, 栈
size()
empty()
push() 向栈顶插入一个元素
top() 返回栈顶元素
pop() 弹出栈顶元素
deque, 双端队列
size()
empty()
clear()
front()/back()
push_back()/pop_back()
push_front()/pop_front()
begin()/end()
[]
set, map, multiset, multimap, 基于平衡二叉树(红黑树),动态维护有序序列
size()
empty()
clear()
begin()/end()
++, -- 返回前驱和后继,时间复杂度 O(logn)
set/multiset
insert() 插入一个数
find() 查找一个数
count() 返回某一个数的个数
erase()
(1) 输入是一个数x,删除所有x O(k + logn)
(2) 输入一个迭代器,删除这个迭代器
lower_bound()/upper_bound()
lower_bound(x) 返回大于等于x的最小的数的迭代器
upper_bound(x) 返回大于x的最小的数的迭代器
map/multimap
insert() 插入的数是一个pair
erase() 输入的参数是pair或者迭代器
find()
[] 注意multimap不支持此操作。 时间复杂度是 O(logn)
lower_bound()/upper_bound()
unordered_set, unordered_map, unordered_multiset, unordered_multimap, 哈希表
和上面类似,增删改查的时间复杂度是 O(1)
不支持 lower_bound()/upper_bound(), 迭代器的++,--
bitset, 圧位
bitset<10000> s;
~, &, |, ^
>>, <<
==, !=
[]
count() 返回有多少个1
any() 判断是否至少有一个1
none() 判断是否全为0
set() 把所有位置成1
set(k, v) 将第k位变成v
reset() 把所有位变成0
flip() 等价于~
flip(k) 把第k位取反搜索与图论
树与图的存储
- 树是一种特殊的图,与图的存储方式相同。
- 对于无向图中的边ab,存储两条有向边a->b, b->a。
- 因此我们可以只考虑有向图的存储。
(1) 邻接矩阵:g[a][b]存储边a->b
(2) 邻接表:
c++
// 对于每个点k,开一个单链表,存储k所有可以走到的点。h[k]存储这个单链表的头结点
int h[N], e[N], ne[N], idx;
// 添加一条边a->b
void add(int a, int b)
{
e[idx] = b, ne[idx] = h[a], h[a] = idx ++ ;
}
// 初始化
idx = 0;
memset(h, -1, sizeof h);树与图的遍历
时间复杂度 O(n+m), n 表示点数,m 表示边数
(1) 深度优先遍历
c++
int dfs(int u)
{
st[u] = true; // st[u] 表示点u已经被遍历过
for (int i = h[u]; i != -1; i = ne[i])
{
int j = e[i];
if (!st[j]) dfs(j);
}
}(2) 宽度优先遍历
c++
queue<int> q;
st[1] = true; // 表示1号点已经被遍历过
q.push(1);
while (q.size())
{
int t = q.front();
q.pop();
for (int i = h[t]; i != -1; i = ne[i])
{
int j = e[i];
if (!st[j])
{
st[j] = true; // 表示点j已经被遍历过
q.push(j);
}
}
}拓扑排序
c++
bool topsort()
{
int hh = 0, tt = -1;
// d[i] 存储点i的入度
for (int i = 1; i <= n; i ++ )
if (!d[i])
q[ ++ tt] = i;
while (hh <= tt)
{
int t = q[hh ++ ];
for (int i = h[t]; i != -1; i = ne[i])
{
int j = e[i];
if (-- d[j] == 0)
q[ ++ tt] = j;
}
}
// 如果所有点都入队了,说明存在拓扑序列;否则不存在拓扑序列。
return tt == n - 1;
}朴素dijkstra算法
c++
#include <bits/stdc++.h>
using namespace std;
const int N = 510;
int g[N][N], dis[N];//稠密图用邻接矩阵,dis表示到原点的距离
bool st[N];//st 表示下标顶点是否被更新过(加入了最短路径里),
int n, m;
int dijkstra()
{
memset(dis, 0x3f, sizeof dis);
dis[1] = 0;//初始化原点的距离为1
for (int i = 0; i < n - 1; i++) {//n-1迭代
int t = 0;
for (int j = 1; j <= n; j++) {
if(!st[j] && dis[j] < dis[t]) {
t = j;//找到没有被更新过的点集中到原点距离最小的顶点
}
}
//用这个点更新其他所有顶点(或者未被确定为最短路径的顶点)到原点的最短路径
for (int j = 1; j <= n; j++) {
dis[j] = min(dis[j], dis[t] + g[t][j]);//判断经过t点距离是否变短了
}
st[t] = true;
}
//判断终点是否被纳入最短路径的点集中
if (dis[n] == 0x3f3f3f3f) {
return -1;
} else {
return dis[n];
}
}
int main()
{
cin >> n >> m;
memset(g, 0x3f, sizeof g);
int a, b, c;
for (int i = 0; i < m; i++) {
cin >> a >> b >> c;
g[a][b] = min(g[a][b], c);
}
cout << dijkstra() << endl;
return 0;
}堆优化版dijkstra
c++
#include <bits/stdc++.h>
using namespace std;
#define x first
#define y second
typedef pair<int, int> pii;
const int N = 2e5 + 10;
int n, m;
int h[N], e[N], w[N], ne[N], idx;//w[i]存储权重
bool st[N];
int dis[N];//到原点的距离
void insert(int a, int b, int c) {
// 有重边也不要紧,假设1->2有权重为2和3的边,再遍历到点1的时候2号点的距离会更新两次放入堆中
// 这样堆中会有很多冗余的点,但是在弹出的时候还是会弹出最小值2+x(x为之前确定的最短路径),
// 并标记st为true,所以下一次弹出3+x会continue不会向下执行。
e[idx] = b;
w[idx] = c;
ne[idx] = h[a];
h[a] = idx++;
}
int dijkstra()
{
// 这里heap中为什么要存pair呢,首先小根堆是根据距离来排的,所以有一个变量要是距离,
// 其次在从堆中拿出来的时候要知道知道这个点是哪个点,不然怎么更新邻接点呢?所以第二个变量要存点。
priority_queue<pii, vector<pii>, greater<pii>> heap;
memset(dis, 0x3f, sizeof dis);
dis[1] = 0;
//小根堆按要距离排序,找到离原点距离最小的顶点
heap.push({0, 1});
while (!heap.empty()) {
auto tmp = heap.top();
heap.pop();
int distance = tmp.x;
int vertex = tmp.y;
if (st[vertex]) continue;
st[vertex] = true;//从小根堆里最先取出来一定最短距离,表示这个点的最短距离已经确定,用这个点来更新它的邻接点距离
for (int i = h[vertex]; i != -1; i = ne[i]) {
int j = e[i];
if (dis[j] > dis[vertex] + w[i]) {
dis[j] = dis[vertex] + w[i];
heap.push({dis[j], j});
}
}
}
if (dis[n] == 0x3f3f3f3f) return -1;
else return dis[n];
}
int main()
{
cin >> n >> m;
int a, b, c;
memset(h, -1, sizeof h);//一定要记得初始化头节点
for (int i = 0; i < m; i++) {
cin >> a >> b >> c;
insert(a, b, c);
}
cout << dijkstra() << endl;
return 0;
}spfa算法
c++
int dis[N];// 存储每个点到1号点的最短距离
bool st[N];// 存储每个点是否在队列中
void spfa() {
memset(dis, 0x3f, sizeof dis);
dis[1] = 0;
queue<int> que;//存哪些节点被更新过
st[1] = true;
que.push(1);
while (!que.empty()) {
int t = que.front();
que.pop();
st[t] = false;
for (int i = h[t]; i != -1; i = ne[i]) {
int j = e[i];
if (dis[j] > dis[t] + w[i]) {
dis[j] = dis[t] + w[i];
if (!st[j]) {//被更新过且不在队列中
st[j] = true;
que.push(j);
}
}
}
}
}spfa判断图中是否存在负环
c++
int h[N], e[M], ne[M], w[M], idx;//邻接表存储所有边
int dis[N], st[N], cnt[N];//dist[x]存储1号点到x的最短距离,cnt[x]存储1到x的最短路中经过的点数
int n, m;//点数,边数
bool spfa() {
queue<int> que;//不用初始化dis,全为0,最开始更新负权边
for (int i = 1; i <= n; i++) {//直接更新所有点
que.push(i);
st[i] = true;
}
while (!que.empty()) {
int t = que.front();
que.pop();
st[t] = false;
for (int i = h[t]; i != -1; i = ne[i]) {
int j = e[i];
if (dis[j] > dis[t] + w[i]) {
dis[j] = dis[t] + w[i];
// 被更新了表示t->j经过了一个点,如果经过了n个点,共n+1个点,表示有负权回路
cnt[j] = cnt[t] + 1;
if (cnt[j] >= n) return true;
if (!st[j]) {
st[j] = true;
que.push(j);
}
}
}
}
return false;
}prim算法求最小生成树
c++
const int INF = 0x3f3f3f3f;
int g[N][N];
int dist[N]; // 存储其他点到当前最小生成树的距离
bool st[N];
int prim() {
// 初始化入选点集
memset(dist, 0x3f, sizeof dist);
int res = 0;
for (int i = 0; i < n; i++) {
int t = -1;
for (int j = 1; j <= n; j++) {
// 找到点集外到点集距离最小的点
if (!st[j] && (t == -1 || dist[j] < dist[t])) {
t = j;
}
}
if (i && dist[t] == INF) return INF;
if (i) res += dist[t];
st[t] = true;
for (int j = 1; j <= n; j++) {// 更新点集外的点到集合的距离
dist[j] = min(dist[j], g[t][j]);
}
}
return res;
}Kruskal算法求最小生成树
c++
#include <bits/stdc++.h>
using namespace std;
const int N = 1e3 + 10, M = 3 * N;
int p[N];
int n, m;
struct Edge {
int a, b, w;
}edge[M];
bool cmp(struct Edge &l, struct Edge &r) {
return l.w < r.w;
}
int find(int x) {
if (p[x] != x) {
p[x] = find(p[x]);
}
return p[x];
}
int main()
{
cin >> n >> m;
for (int i = 0; i < m; i++) {
cin >> edge[i].a >> edge[i].b >> edge[i].w;
}
sort(edge, edge + m, cmp);
for (int i = 1; i <= n; i++) p[i] = i;
int cnt = 0, res = 0;
for (int i = 0; i < m; i++) {
int a = edge[i].a, b = edge[i].b, w = edge[i].w;
if (find(a) != find(b)) {
cnt++;
res += w;
p[find(a)] = find(b);
}
}
if (cnt != n - 1) cout << "-1";
else cout << res;
return 0;
}求LCA
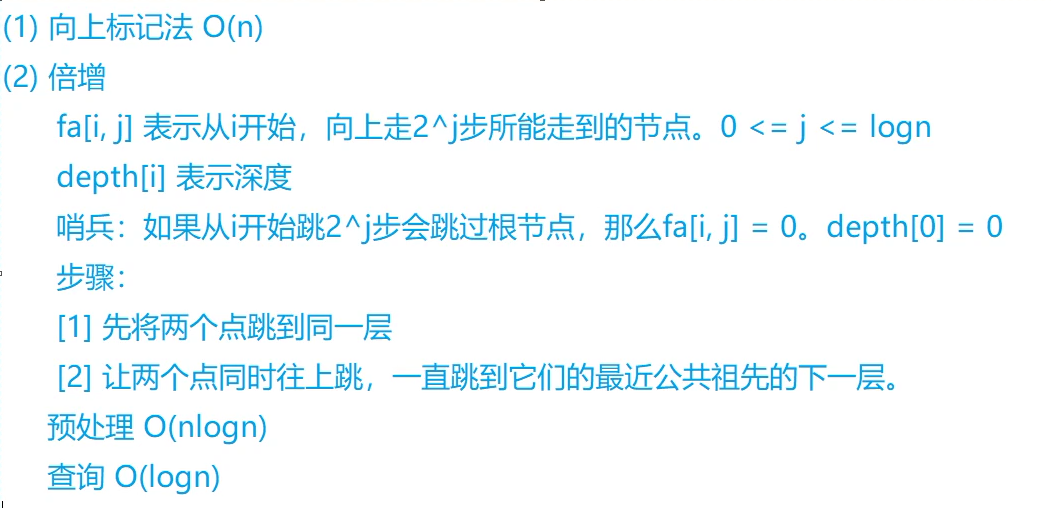
c++
// 倍增法
const int N = 5e5 + 10 , M = N * 2;
int depth[N], fa[N][25]; // depth为树的深度,fa为i节点向上跳2^j个距离后的节点
void bfs(int root) {
queue<int> que;
memset(depth, 0x3f, sizeof depth);
depth[0] = 0, depth[root] = 1; // 设置0为哨兵,fa中跳过了就为0
que.push(root);
while (!que.empty()) {
int t = que.front();
que.pop();
for (int i = h[t]; i != -1; i = ne[i]) {
int j = e[i];
if (depth[j] > depth[t] + 1) {
depth[j] = depth[t] + 1;
que.push(j);
fa[j][0] = t;
for (int k = 1; k <= 20; k++) {
fa[j][k] = fa[fa[j][k - 1]][k - 1]; //2^(k-1) + 2^(k-1)
}
}
}
}
}
int lca(int a, int b) {
if (depth[a] < depth[b]) swap(a, b);
for (int k = 20; k >= 0; k--) {
if (depth[fa[a][k]] >= depth[b]) {
a = fa[a][k];
}
}
if (a == b) return a;
for (int k = 20; k >= 0; k--) {
if (fa[a][k] != fa[b][k]) {// 没有跳过
a = fa[a][k];
b = fa[b][k];
}
}
// 2进制拼凑必然跳到公共祖先的下一层 1 2 4 8 ,13步必然先跳8->2->1;
return fa[a][0];
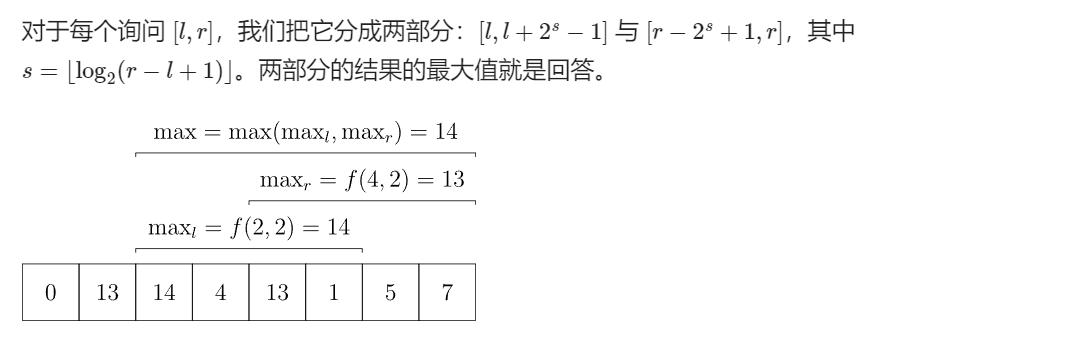
}ST表
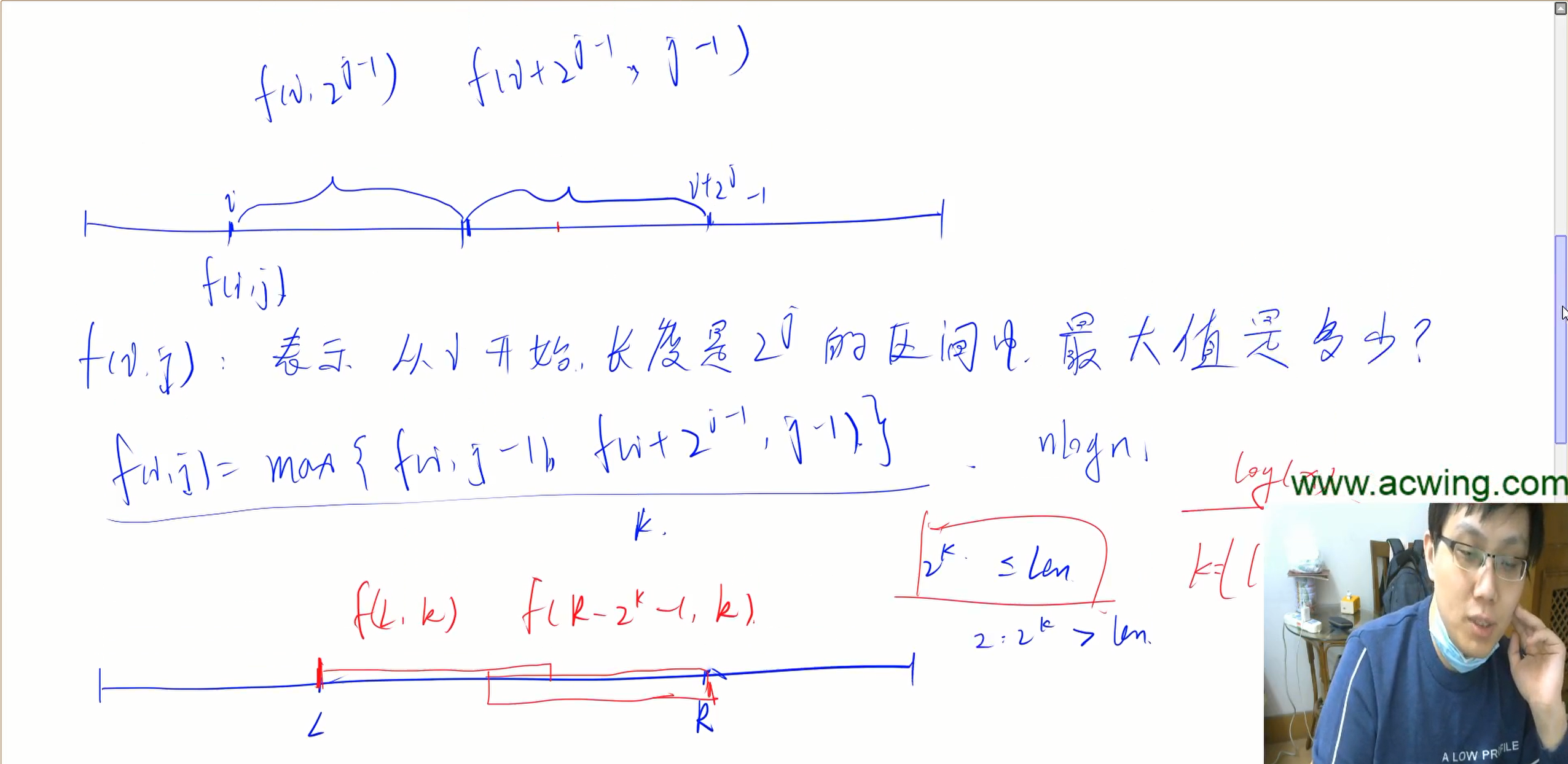
c++
// RMQ 区间最大查询
const int N = 1e5 + 10, M = 20;
int a[N], f[N][M]; //f[i][j]表示从i开始长度为j的区间最大值
//预处理
for (int j = 0; j < M; j++) {// 2^j 区间长度范围
for (int i = 1; i + (1 << j) - 1 <= n; i++) {
if (!j) f[i][j] = a[i];
else f[i][j] = max(f[i][j - 1], f[i + (1 << (j - 1))][j - 1]);
}
}
// 查询
int query(int l, int r) {
int len = r - l + 1;
int k = log2(len);
return max(f[l][k], f[r - (1 << k) + 1][k]);
}数学知识
质数
- 1.质数和合数是针对所有大于1的 “自然数” 来定义的(所有小于等于1的数都不是质数).
- 2.所有小于等于1的整数既不是质数也不是合数.
- 3.质数和素数都是同一种性质,只是叫法不同.
c++
//试除法判定质数
bool is_prime(int x)
{
if (x < 2) return false;
for (int i = 2; i <= x / i; i ++ )
if (x % i == 0)
return false;
return true;
}(1).”d|n”代表的含义是d能整除n,(这里的”|”代表整除). (2).一个合数的约数总是成对出现的,如果d|n,那么(n/d)|n,因此我们判断一个数是否为质数的时候, 只需要判断较小的那一个数能否整除n就行了,即只需枚举d<=(n/d),即dd<=n,d<=sqrt(n)就行了.
试除法分解质因数
c++
void divide(int x)
{
for (int i = 2; i <= x / i; i ++ )//求小于等于sqrt(n)的质因数
if (x % i == 0)
{
int s = 0;
while (x % i == 0) x /= i, s ++ ;
cout << i << ' ' << s << endl;
}
if (x > 1) cout << x << ' ' << 1 << endl;
cout << endl;
}- 一个合数分解而成的质因数最多只包含一个大于sqrt(n)的质因数 (反证法,若n可以被分解成两个大于sqrt(n)的质因数,则这两个质因数相乘的结果大于n,与事实矛盾).
- 当枚举到某一个数i的时候,n的因子里面已经不包含2 ~ i-1里面的数, 如果n%i==0,则i的因子里面也已经不包含2 ~ i-1里面的数,因此每次枚举的数都是质数.
- 算数基本定理(唯一分解定理):任何一个大于1的自然数N,如果N不为质数,那么N可以唯一分解成有限个质数的乘积 N=P1^a1^P2^a2^P3^a3^......Pn^an^,这里P1 < P2 < P3 ...... <Pn 均为质数,其中指数ai是正整数。
筛质数
诶氏筛法$O(nloglogn)$
- 原理:在朴素筛法的过程中只用质数项去筛.
- 时间复杂度:粗略估计:$O(n)$.实际:$O(nlog(logn))$.
- 1~n中,只计算质数项的话,”$1/2+1/3+1/4+1/5+…+1/n$”的大小约为$log(logn)$.
c++
int primes[N], cnt; // primes[]存储所有素数
bool st[N]; // st[x]存储x是否被筛掉
void get_primies(int n) {
for (int i = 2; i <= n; i++) {
if (st[i]) continue;
cnt++;
for (int j = i + i; j <= n; j += i) {//是质数就用这个质数取筛它的倍数
st[j] = true;
}
}
}线性筛法$O(n)$
- 核心:1~n内的合数p只会被其最小质因子筛掉.
- 原理:1~n之内的任何一个合数一定会被筛掉,而且筛的时候只用最小质因子来筛,然后每一个数都只有一个最小质因子,因此每个数都只会被筛一次,因此线性筛法是线性的.
线性筛法中,i是质数就筛掉i与primes中所有质数的乘积;
i是非质数筛掉i与primes中所有<=(i的最小质因子)的乘积;
c++
void get_primies(int n) {
for (int i = 2; i <= n; i++) {
if (!st[i]) primes[cnt++] = i;
for (int j = 0; primes[j] <= n / i; j++) {
//i是非质数筛掉i与primes中所有<=i的最小质因子的乘积
st[i * primes[j]] = true;
//i是质数就筛掉i与primes中所有质数的乘积
if (i % primes[j] == 0) break;
}
}
}试除法求所有约数
c++
vector<int> get_divisors(int x)
{
vector<int> res;
for (int i = 1; i <= x / i; i ++ )
if (x % i == 0)
{
res.push_back(i);
if (i != x / i) res.push_back(x / i);
}
sort(res.begin(), res.end());
return res;
}数个数和约数之和
如果 N = p1^c1 * p2^c2 * ... *pk^ck
约数个数: (c1 + 1) * (c2 + 1) * ... * (ck + 1)
约数之和: (p1^0 + p1^1 + ... + p1^c1) * ... * (pk^0 + pk^1 + ... + pk^ck)欧几里得算法
c++
int gcd(int a, int b)
{
return b ? gcd(b, a % b) : a;
}快速幂
c++
ll fast_pow(int a, int b, int p) {
ll res = 1 % p;
while (b) {
if (b & 1) res = res * (ll)a % p;
a = a * (ll)a % p;//转化成ll防止溢出
b = b >> 1;
}
return res;
}